LiDAR Link Budget
By Olov von Hofsten|
One of the most important specifications of a LiDAR is the range. How far can the LiDAR see? This may be the first question one asks. You quickly realize that this depends on a multitude of extrinsic and intrinsic parameters. For the extrinsic parameters, target reflectivity and sunlight illuminance are the two most important factors (which is why they are usually provided in a spec) but directionality of the surface reflection and albedo, together with the tilt of the surface in reference to the laser beam direction is also highly influential (most cases assume Lambertian surface and normal incidence). There are many intrinsic parameters: Laser beam power, collecting aperture, detector size and filter bandpass. In this post I will try to sort out these parameters and present them in an interactive graph. This work is usually referred to as the link budget since we are trying to calculate the number of photons. We will see that both signal photons and noise photons need to be calculated. In practice, one needs to consider things like the occurrence of negative positives and how sure you want to be on your range. Since that discussion is outside the scope of this article, I set a very hard limit.
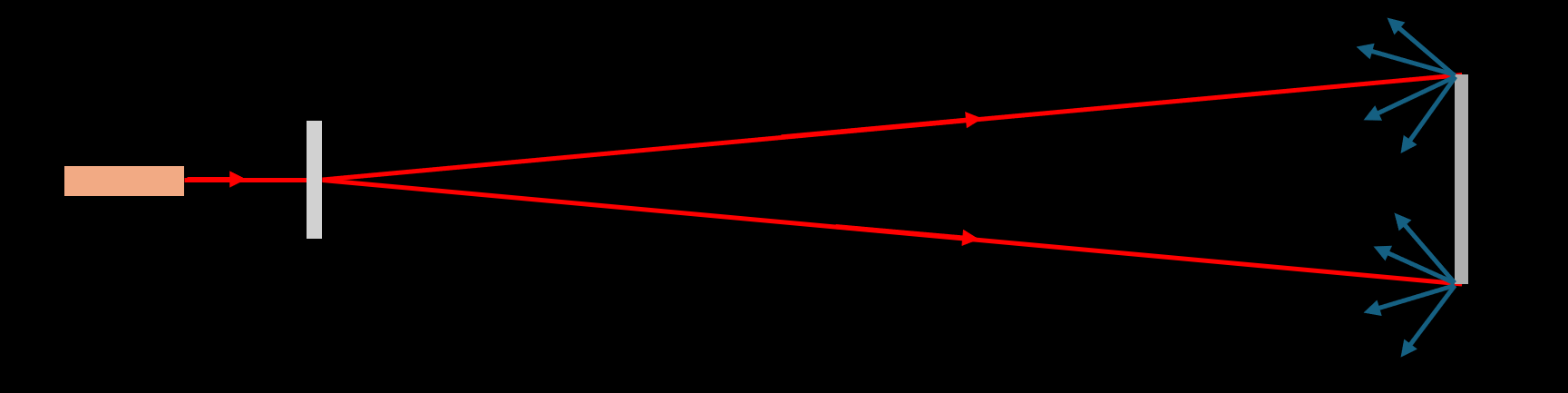
I will only look at time-of-flight flash LiDAR in this blog post. In Fig 1 you can see the setup of a flash LiDAR.
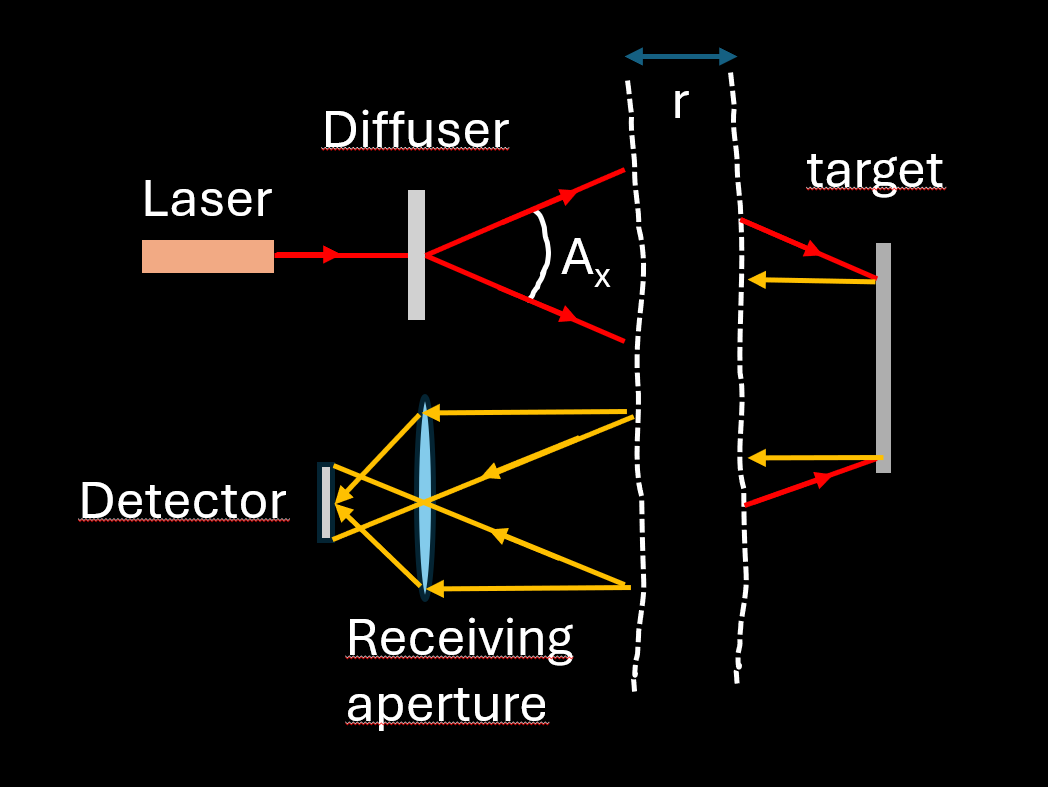
Fig 1. The principle of a Flash Lidar. A laser hits a diffuser which illuminates the entire field-of-view. The light hits a target at a distance r, and light is reflected back to the detector via a receiving aperture.
Emitter
Let’s start with the source of the light. We need a laser. The laser should not be visible to the eye, and it should not be absorbed by water. In addition, we should be able to detect it with standard silicon detectors. This narrow it down to ~900 – 1100 nm. There are three laser wavelengths being widely manufactured in this range: 910, 940 and 1064 nm. These are the wavelengths used in most ToF LiDARs.
When setting the power of the laser we need to consider eye safety. This can get complicated for scanning LiDARs but it is easier in our case with a flash. Assuming a small virtual source (C6 = 1) and the case of the unaided eye, we can use the default (simplified) evaluation with condition 3 (IEC 60825-1:2014, table 10) which yields the following limits for a class 1/1M laser product for the three listed wavelengths above (IEC 60825-1:2014, table 3 and table 9)
| Wavelength | Accessible emission limit in 7 mm aperture, 100 mm from the LiDAR, for t >10s, Φavg | Pulse energy limit for pulse group (see table 2 and 3 of IEC-60825) for 7 mm aperture, Qmax |
| 910 nm | 1.0 mW | 195 nJ |
| 940 nm | 1.26 mW | 225 nJ |
| 1064 nm | 1.95 mW | 758 nJ* |
Table 1: Class 1 eye safety limits assuming C6 = 1, unaided eye. Note that t is the measurement time. *for 1064 nm the pulse group time is 13 µs instead of 5 µs for 910 and 940 nm. We assume that only one pulse fits into this time.
We need to consider both long and short integration time limits (they correspond to two different types of damage to the eye – burning and heating). These are shown in the two columns.
We can start with the average power, when t>10s. With a given laser repetition rate, f, we have the peak pulse power by:
For example, for a 910 nm wavelength, 5 ns pulse time and 2 kHz repetition rate, we need to keep the peak pulse power below 100 W ([HK1] [Ov2] using the values in Table 1, this is valid into a 7 mm aperture at 100 mm distance from the emitting aperture) in order to keep below the longterm limit. For the short time limit we calculate the pulse energy by
For a 100 W peak power and 2 kHz repetition rate, the pulse energy is 500 nJ. This is more than a factor of 2 above the single pulse limit (table 1). We need to increase the laser frequency so that the pulse energy is lower, for a given average power. The minimum frequency allowed is given by
So, we need to increase the repetition frequency to above 5.1 kHz to stay eye safe in the single pulse case.
Next thing to consider is the divergence of the emitter. This will be the area over which the light is spread out, or equally the field-of-view of the flash LiDAR. Let AX be the horizontal field-of-view of the emitted pulse, and Ay be the vertical field-of-view.
The 7 mm pupil of the eye takes up 4 degrees at 100 mm (we will call this constant αeye) so with Ax x Ay degrees field-of-view, we have a relation to the emitted peak power by
By combining equation (1) and (2) we have
Now switching to fmin for the laser frequency. The emitted peak power is calculated from the efficiency of the emitter, nemitter and the laser peak power, Φlaser

Target
So now the light has been emitted and is travelling through space. For long distances, some light will be absorbed in the air. This is wavelength dependent and weather dependent, but a reasonable approximation for our wavelength range is (ref 1)
Where r is the distance travelled. For the range of a flash LiDAR (30 m), this factor is about 0.97. After surviving any absorption, the beam hits the target and is reflected. Most link budgets assume a Lambertian target and so will I. Therefore, the solid angle that the light spreads into is simply π. The radiant intensity of the laser beam from the target is therefore
Where Rtarget is the target reflectivity and we assume normal incidence on the target.
Receiver
On the way back to the receiver (assuming it is in about the same place as the emitter) light is again absorbed by the air. The amount of light at the receiver is the target radiant intensity multiplied by the receiver solid angle and the absorption factor natmos:

Areceiver is the area of the receiving aperture. If the receiver array is matched to the emitted field, this will be the total received power. Given a certain vertical and horizontal resolution Nx x Ny, the peak power per pixel is
Now we just want to convert this to photons, so therefore we need to multiply by the pulse time and by λ/hc (wavelength divided by Plancks constant and the speed of light, ie the photon energy):

This is the number of photons per pulse. To convert this to photons per frame, we multiply with the repetition rate and divide by the framerate. So finally,

Where FPS is the framerate. So, how many photons do we need? As you may know that is the wrong question. What we want to know is what SNR do we need! This depends on how sure you want to be of your target. What probability of detection do you need? This will be different in automotive (usually > 90%) and in other industries. For ease of discussion, I will set the limit to 17 dB.
To calculate the SNR we need the noise. And in the LiDAR case the source of noise is a big adversary – namely the sun. The sun irradiance on a target depends on the wavelength band you are looking at. The width of the wavelength band depends on how wide you can have your filter on the receiver. Many factors may weigh in on that like temperature range, angles, batch variations…. Fig 2 shows the sun irradiance at sea level with the relevant bands in table 2 highlighted (ref 2).
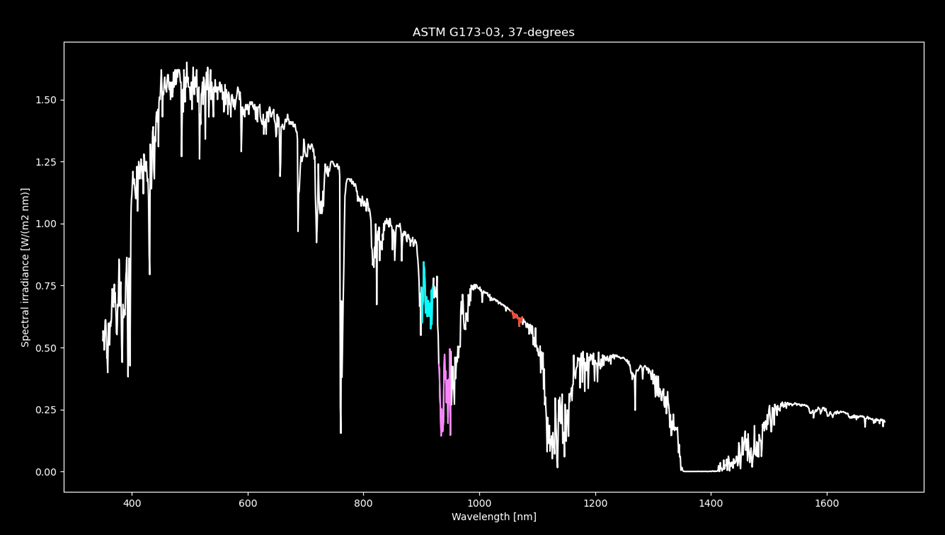
Fig 2. Sun spectrum at sea level according to ASTM G173. 20 nm bands around 910 nm, 940 nm and 1064 nm are shown in cyan, magenta and red respectively.
The 940 nm band contains less sunlight than the 910 nm band due to the H2O absorption in the atmosphere. Silicon photodiode responsivity is a little bit higher for 940 nm (and lower for 1064 nm) but since I will only be considering optical SNR in this article, I am not taking this into account.
Integrating the data shown in Fig 2 over two different bands give irradiance levels at the target as
| Wavelength | Irradiance for 20 nm band, Esun | Irradiance for 40 nm band, Esun |
| 910 nm | 13.7 W/m2 | 28.5 W/m2 |
| 940 nm | 6.1 W/m2 | 16.5 W/m2 |
| 1064 nm | 12.5 W/m2 | 25 W/m2 |
Table 2: Solar irradiance levels for different wavelength bands
The total number of solar photons on the detector can be calculated from these numbers by multiplying with the footprint of the detector. We start by deriving the radiant intensity by doing this and dividing by pi, plus adding the surface reflectivity:
Next step is to multiply by the solid angle of the detector to get the power at the receiver:

It should come to no surprise that the range dependency cancels out (luminance is not distance dependent) and we are left with (simultaneously switching to Nsun, frame here, please keep up):

Where I choose 2*tpulse as the integration time, since the integration time is longer than the pulse time. But this can be discussed. The optical SNR is given by the signal divided by the noise, which if it is Poisson-distributed will be the square root of the background level. I am not taking into account the shot noise of the signal, but in some cases it is relevant.
Here I could of course try and combine equations (3), (4), (5) and (6). But I doubt it would give a better overview. Instead, I have implemented these equations into an online graphing calculator.
https://www.desmos.com/calculator/bqgkvj7iu8?lang=sv-SE
Several conclusions can be drawn from the Desmos calculator. First, we are only looking at the optics and in the case of background light limitation. Also, full flash with a small virtual source. So, this is not applicable to a real LiDAR! We can still say a few things. One is that it is better to concentrate light into a short period of time. Longer pulse times lead to lower SNR at the same time. This is what makes dToF LiDAR performing better than iToF, which uses longer pulse/integration times. Also, range scales with the square root of the receiver aperture diameter (4x larger diameter yields 2x longer range).
A comparison for the three different wavelengths are shown in Fig 3. Clearly, 1064 nm gives the best range of the three due to the higher eye safety limit. But, other things will impact, especially Si PD responsivity. The SNR limit of 17 dB is shown as the cyan line, but should not be taken as absolute.
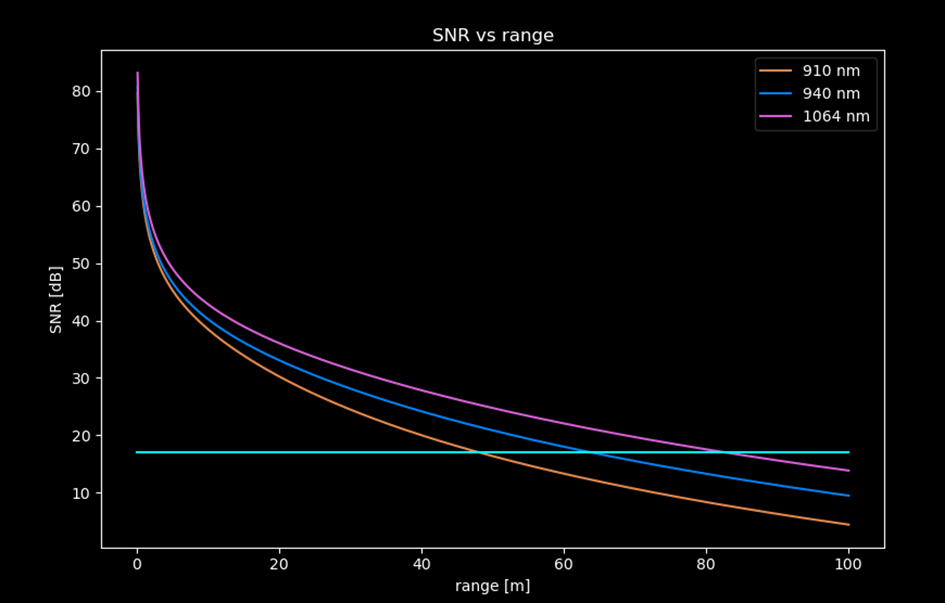
Fig 3. SNR versus range for three different wavelengths. The red line shows the detection threshold, which can be considered approximate (but not too far from the truth). In an actual linkbudget, one needs to add the contribution of detectors and the other electronics.
References
- McMahanon, Paul. LiDAR Technologies and Systems, SPIE Press Bellingham Washington. pp 97-98.
- https://www.astm.org/g0173-03r20.html