The Myth of the 10 000 Lux Lamp
December in Stockholm and the sun rises at 8.30 and sets at 14.30, which makes many of us wonder, “why am I living here” or start looking for southern vacation destinations. It also leads to several articles in the newspapers about hacks on how to avoid winter depression or just get less tired. Artificial lighting […]
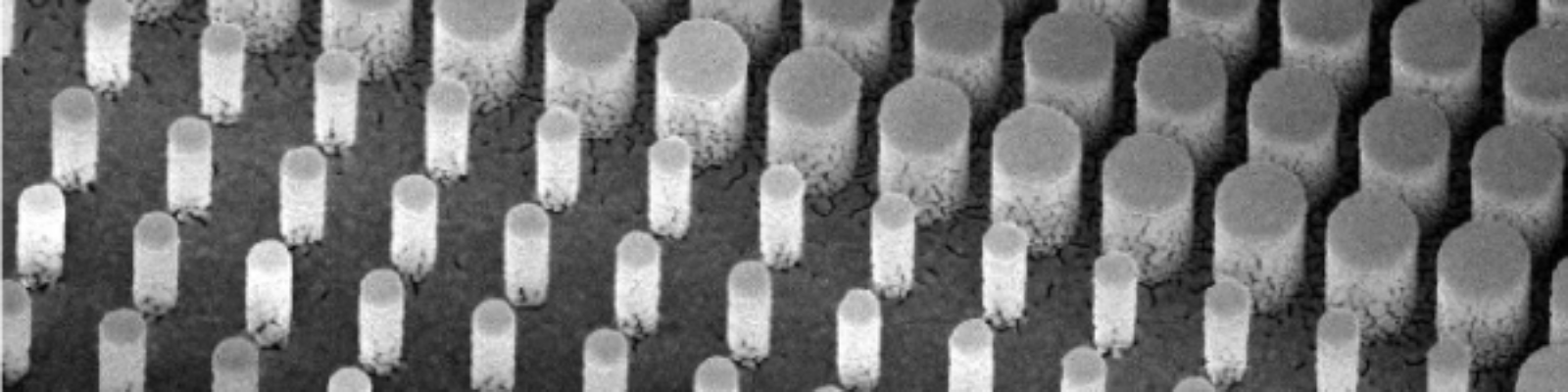
Everything you wanted to know about Metaoptics but were too afraid to ask
By Olov von Hofsten | Metaoptics brings something truly new and innovative to optics. The possibility to exchange a large number of lenses into a thin, flat surface sounds almost too good to be true. Metaoptics has been around for a while now, and we now see many applications introduced by Samsung, Google, ST, and […]
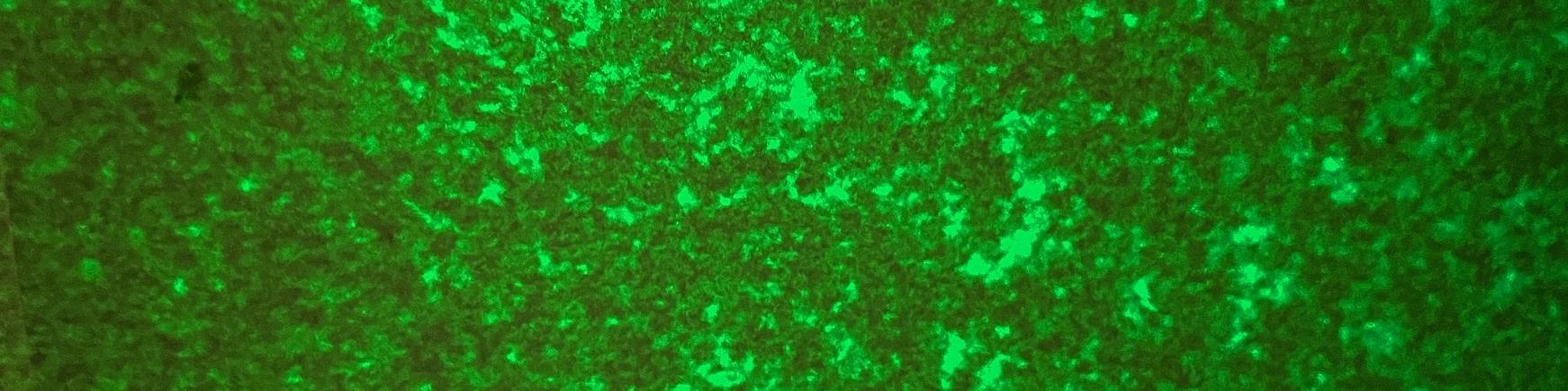
Speckles and their likelihood of detection
By Olov von Hofsten| Speckles are something that I have always been fascinated by. When I saw them for the first time, during school, they didn’t look like anything I had ever seen before. The pattern of bright dots moves with your position as if they are floating in space and you cannot focus on […]
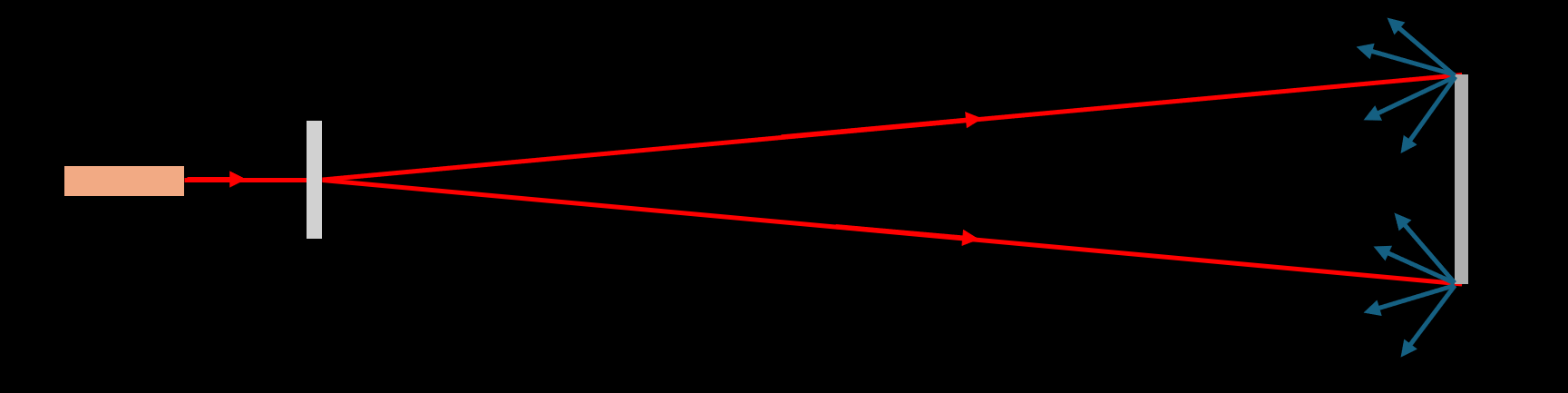
LiDAR Link Budget
By Olov von Hofsten| One of the most important specifications of a LiDAR is the range. How far can the LiDAR see? This may be the first question one asks. You quickly realize that this depends on a multitude of extrinsic and intrinsic parameters. For the extrinsic parameters, target reflectivity and sunlight illuminance are the [&hell
Using the EMVA1288 standard
By Linus Frantzich | Comparing the performance of two image sensors can almost be an administrative, rather than a technical task. Most image sensor metrics depend on exposure time, gain, lens performance and temperature to name a few. Including all conditions and comparing using the same conditions exponentially increases the adminis

The Optics Of Rainbows
By Gustav Strömqvist | Rainbows are a beautiful physical phenomenon, forming as the result of how the sunlight refracts and reflects inside droplets of water before reaching your eyes. In the visible range, water has a refractive index of n ≈ 1.33 or n ≈ 4/3, with a difference of around 0.0013, or 1%, between violet (400
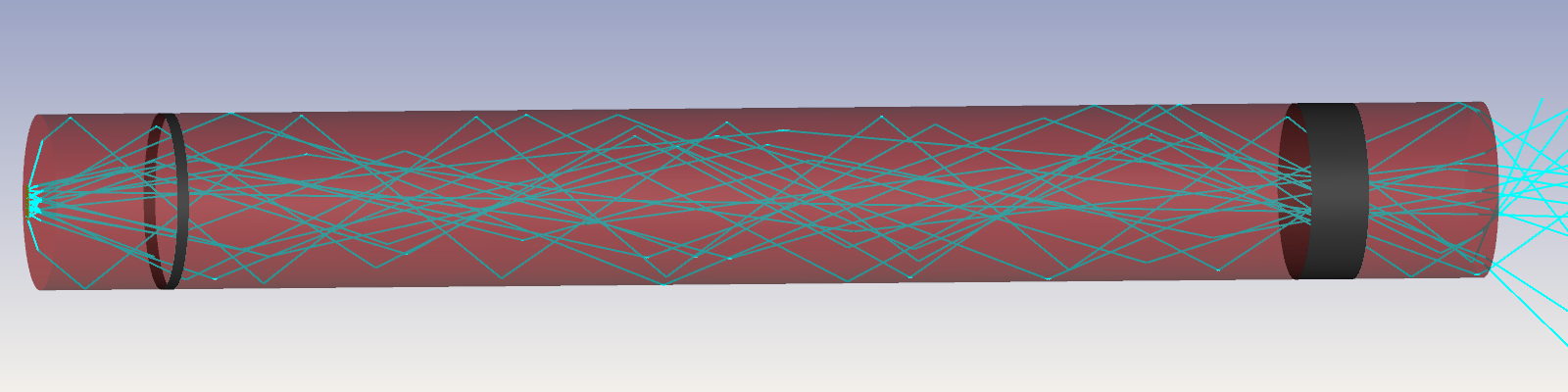
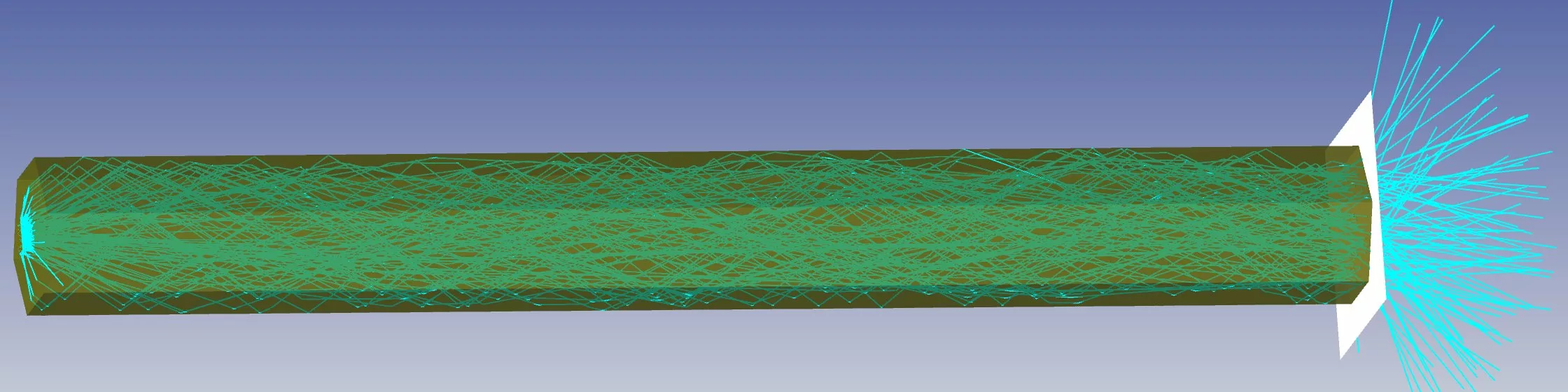
Lightguides – shape and performance – part 2
By Billy Kaldvee | In the last post we recommended to keep the distance between the LED and the light guide ten times smaller than the light guide diameter. To demonstrate why this is recommended for a high efficiency system, we once again do simulations on the 3 mm diameter circular light guide with the […]
Lightguides – shape and performance – part 1
By Billy Kaldvee | Have you ever done a mechanical design of a light guide without doing any optical simulations and wondered why the result looked as something you did not expect? In two posts we go through some of the basic aspects of light guide geometries and how they influence the perceived output. In […]
Etendue and Optical Invariants
By Olov von Hofsten and Simon Olin | “The possibilities of optics are endless” – you may have heard things like this and it sounds great and wonderful. Unfortunately it is not true – you have been told a lie. The possibilities of optics are NOT endless. In fact, it is very important to know […]
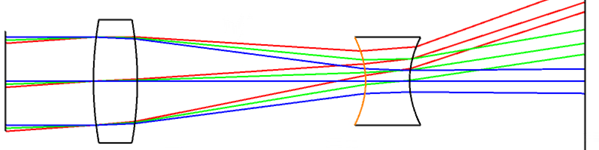
The Perfect LiDAR – does it exist?
By Olov von Hofsten | As a consultant, I have often been approached by unrealistic requirements from customers, and the LiDAR business is particularly prone to this. Perhaps because the technology is new. A customer often wants: If a customer was to write a specification for a camera system, this would not happen, as there […]